
联系我们
商务产品部电话:0311-85981531
手机:刘15931108710 杨13633115957
技术支持部 李:13722998292
系统集成部 施:13731153636
售后服务部 谷:0311-85981532
地址:ror体育平台app下载


商务产品部电话:0311-85981531
手机:刘15931108710 杨13633115957
技术支持部 李:13722998292
系统集成部 施:13731153636
售后服务部 谷:0311-85981532
地址:ror体育平台app下载


 DRS60L3SS1BN002
DRS60L3SS1BN002
台达水平关节机器人可广泛应用在消费性电子产品、电子电机、橡塑料、包装、金属制品业的插件、锁螺丝、组装、涂胶、移载、焊锡、搬运及包装等应用领域,轻松简易地结合外围控制单元,进而打造出精简、高整合性的机器人工作站,DRS60L6SS2系列基于前代设计进行优化,提升整体速度并优化安装空间,帮助客户简便导入自动化应用。
采用高弹性、高整合性的台达水平关节机器人,以及外围自动化零件 (如伺服系统、视觉系统、线性模块等),不仅能满足单机或结合移载平台应用,更可因应产线变化,实现多机种混线生产、快速制程重组,维持质量一致性的同时,满足客户需求。
台达水平关节机器人具备快速简易导入产线自动化的优势,在制造系统中呈现更高的灵活性,助力实现智能生产,体现高效率自动化,有效提升质量、生产效率、人均产值并节省工时。
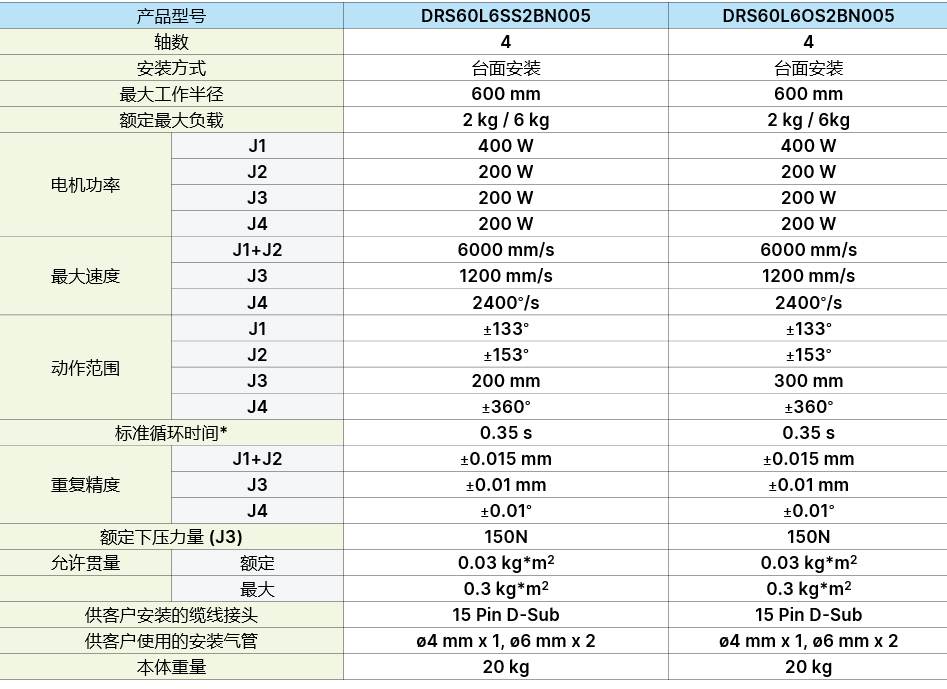
* 负载 1 kg 时,上下移动 25 mm,水平移动 300 mm,往返所需的时间。测试环境温度 25ºC, 环境相对湿度 45% ~ 65% RH